AIMRL
Patents & Innovation

PIONEERING INTELLIGENT MECHATRONICS
30+ years of innovation at the intersection of perception, actuation, and bio-inspired design.
AIMRL’s research is driven by a unified vision: integrating sensing, actuation, and control into a single coherent architecture. Rather than treating sensors and actuators as separate, add-on components, AIMRL advances a paradigm of Integrated Human-Like Intelligence, where perception and actuation are physically and functionally coupled.
This philosophy has evolved into three pillars of innovation, spanning multi-physics field-based perception, multi-DOF actuation, and adaptive bio-robotics.
Pillar I: Multi-Physics Field-Based Sensing & Perception
AIMRL challenges the limits of traditional sensors by treating Electromagnetic (EM), Optical, and Mechanical fields as high-dimensional information sources. By solving inverse field problems, we enable machines to "see" through materials and reconstruct complex geometries.
Patent
Title & Highlights
Key Impact / Publication
[P1]
Image Reading & Processing Apparatus (US 5,146,340)
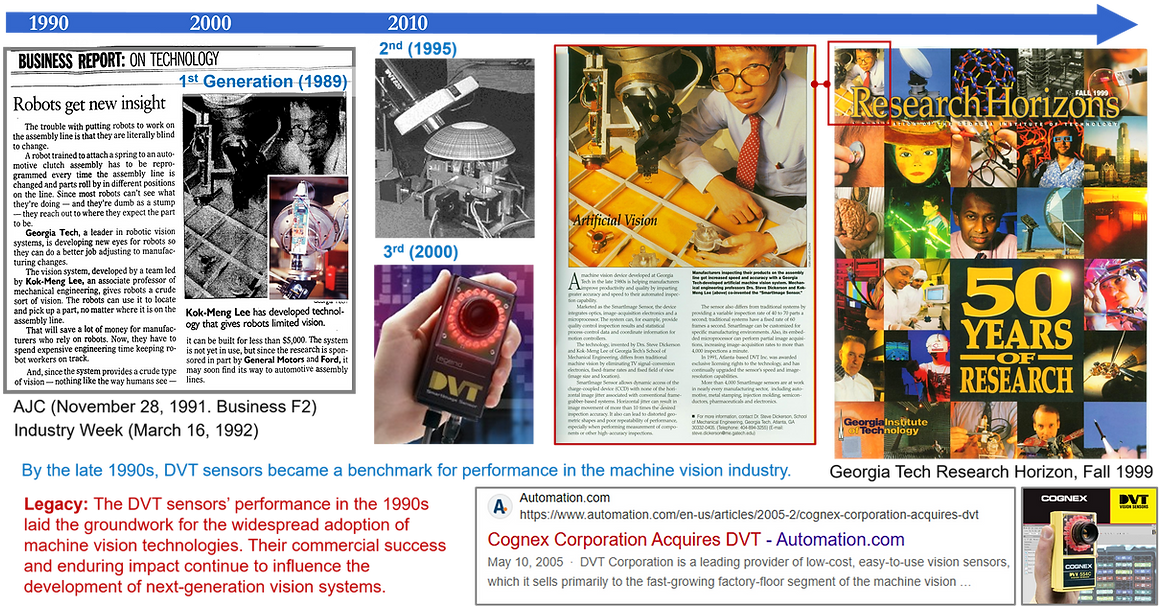
The birth of modern industrial vision. Overcome problems associated with traditional analog-to-digital bottlenecks and 30fps limitations. Enabled direct digital acquisition and on-board computing.
[P2]
3-DOF Orientation Sensing System (US 5,319,577)
Optical field-based 3-DOF motion sensing. 80fps at 0.0047° accuracy; eliminate single-axis encoders.
[P6]
Angular Displacement Measurement (US 6,188,484)
Non-contact angular sensing for HDD production. Co-developed with Maxtor; transformed servo-track writing for high-density drives.
See detailed technical summaries for [P1], [P2], and [P6] ®
Innovation Highlights and Success Stories:
Story 1: From Patent to Industry — Precision Machine Vision (MV) & Sensing
AIMRL’s foundational work in digital acquisition was commercialized as DVT vision sensors, leading to a company acquisition by Cognex for $115M.
-
Physically-Accurate Machine Vision for Engineered Parts: Our hardware leap was grounded in a rigorous design methodology studying illumination and reflectance physics. This ensures the accurate presentation of discrete parts for reliable automated robotic pick-up.
Key Publications: Lee & Li (1991), Lee & Blenis (1994), Parker & Lee (1999) -
ACC-Based Framework for Feature Discrimination: We developed a robust framework using Artificial Color Contrast (ACC) to streamline Color Machine Vision (CMV) algorithms. This methodology discriminates targeted features from backgrounds with closely similar colors, overcoming the unpredictability of natural and biological products.
Key Publication: Lee, Li & Daley (2007), Lu, Huang & Lee (2021), Lu, Lee & Ji (2023) -
HDD Servo-Track Writing & Angular Displacement [P6]: Developed with Maxtor Corporation, this technology enables direct measurement and control of the drive actuator arm via a non-contact optical grating interferometer. This direct control architecture significantly increased the precision and throughput of high-density HDD production lines.
Key Publication: Garner, Lee & Guo, ASME JMSE (2001).
Story 2: Beyond Light — Multi-Physics Field Reconstruction
The core innovation within this pillar is the creative generation of physics-based fields and presents them as 2D or 3D images. By formulating these distributions as inverse problems, we can reconstruct high-fidelity information and estimate state variables that are otherwise invisible to traditional cameras and discrete sensors:
-
Optical Fields & The "Touch-by-Vision" Paradigm: We moved beyond simple image capture to sensing mechanical contact and deformation fields The key contribution in our visuotactile sensing research is the physics-based calibration of optical refraction and deformation cues, which enables robots to accurately "feel" their environment by reconstructing 3D contact, displacement, and strain.
Key Publication: Ma, Ji & Lee (2022) -
Subsurface Sensing & Material Perception:We established inverse models to reconstruct Eddy Current (EC) from measured magnetic flux density (MFD). This paradigm shift enables the simultaneous estimation of material conductivity, thickness, geometry, and hidden structural flaws far beyond the capability of traditional point sensors.
Key Publication: Lee et al., 2017-2020; Guo, Lee & Xiong (2023-2025) -
Electrical Impedance Sensitivity (Internal Force/Torque Sensing): We pioneered methods for soft-contact sensing and muscle-driven joint-torque estimation by generating electrical impedance sensitivity images. By mapping voltage distributions to mechanical states, we reconstruct force and contact fields without relying on visual or magnetic media.
Key Publication: Li & Lee (2022, 2023). -
Dry Calibration: We revolutionized industrial sensor testing by replacing traditional fluid-based loops with electromagnetic field reconstruction. By modeling internal sensor fields and media interactions as an inverse problem, we enable high-accuracy state estimation and sensor optimization without physical flow.
Key Publication: Hu, Lee et al. (2010-2011)
Story 3: Real-Time Structural & Thermal Field Reconstruction
This research centers on the high-fidelity reconstruction of physical states in complex machining and industrial environments. By integrating physics-guided models with real-time sensing, we allow machines to interpret internal temperature, deformation, and material-state evolution as dynamic, multi-physics fields.
-
Generalized Modal-Expansion for Real-Time Field Sensing: A key impact of our research is the development of the modal-expansion technique as a powerful, general-purpose method for real-time field reconstruction. While traditionally used for mechanical systems, we pioneered its application to thermal systems to reconstruct temperature fields in thin-wall components during machining. This versatile framework provides a computationally efficient alternative to slow numerical solvers, making it a "broad-application" tool for real-time industrial monitoring.
Key Publication: Elsheikh, Guo, Huang, Ji & Lee (2018); Guo et al. (2015) -
Thermal Field Perception & Tool-Health Monitoring:We utilize physics-guided infrared imaging to solve the thermal inversion problem, reconstructing real-time temperature maps at the tool–workpiece interface. This non-contact "thermal imaging" of the cutting zone enables accurate prediction of tool wear and material behavior, replacing traditional point-sensing with high-resolution thermal perception.
Key Publication: Lee et al. (2017-2018) -
Mechanical Deformation & Structural Field Reconstruction:By applying modal-expansion to structural dynamics, we reconstruct real-time displacement and strain fields in thin-walled components. Treating structures as continuous mechanical fields allows machines to sense and compensate for high-frequency vibrations and complex deformations that remain invisible to conventional discrete sensors.
Key Publication: Yu, Guo, & Lee (2018); Ma et al. (2020). -
Advanced Material Constitutive Modeling & Process Inference: This work develops high-fidelity constitutive models that bridge the gap between sensor data and physical reality. By incorporating temperature-dependent dynamic recrystallization, we enable field-based approaches to reconstruct internal stress and material-state evolution during high-speed manufacturing processes.
Key Publication: Huang, Ji & Lee (2018); Huang et al. (2019, 2020).
Pillar II: Integrated Multi-DOF Actuation
We have transitioned from cascaded, single-axis joints to a unified, ball-joint-like spherical. architecture. This singular solution optimizes both physical space and kinematic dexterity and provides superior kinematic dexterity over traditional "stacked" robotic wrists.
Patent
Title & Highlights
Key Impact / Publication
[P3]
Spherical Motor and Methods (US 5,410,232)
Foundational Design to eliminate cascaded actuators to reduce weight/volume in robotic wrists and satellites.
[P4]
Variable-Reluctance Control (US 5,402,049)
First VR spherical-motor control framework for reluctance torque generation.
[P5]
Vision-Based Control Algorithm (US 5,416,392)
Direct vision-in-the-loop actuation. Pioneering integration of perception with 3-DOF torque control.
Magnetic field-based sensing

Concept
Open-loop SWM
Closed-loop
Reaction-free
See detailed technical summaries for [P3], [P4], and [P5]
Innovation Highlights and Success Stories:
Story 1: The Integrated 3-DOF Mechatronic Framework
Our innovation centers on a unified where perception and actuation are physically and functionally coupled.
-
Electromechanical Innovation (High-Redundancy Design): Our 3-DOF spherical motor features a significantly larger number of distributed electrical inputs than degrees of freedom. This allows for efficient heat dissipation and multi-objective optimization to minimize energy losses and bearing wear.
Key Publications: Lee & Kwan (1991), Zhou & Lee (1994), Lee, Sosseh & Wei (2004). -
Mechanically Unconstrained Vision-Based Sensing[P5]: We pioneered high-speed vision to eliminate bulky external encoders, achieving 80fps 3-DOF orientation measurement with a staggering 0.0047° accuracy. This established the possibility of "unconstrained" feedback loops in multi-DOF motion.
Key Publication: Garner, Klement & Lee (2001), Lee & Zhou (2004) -
Direct Magnetic Field-Based Perception & Control:We transitioned to integrated magnetic sensing by treating the motor's internal fields as an information source. This established a "mechanically unconstrained" architecture where the magnetic field serves as both the medium for actuation and the direct feedback loop for control.
Key Publication: Bai & Lee (2014).
Story 2: Analytical Modeling — The "Master-Detail" Approach
We bridge the gap between analytical physics and computational intelligence to achieve precise, real-time motion.
-
Design Analysis & Dynamics (Forward Problem): Our Distributed Multi-Pole (DMP) and Distributed Current Source (DCS) frameworks provide closed-form solutions for magnetic field, force, and torque. This enables high-fidelity analysis of system dynamics without the computational burden of slow numerical solvers.
Key Publication: Son & Lee (2008), Lee, Bai & Lim (2009), Lim & Lee (2015). -
Real-Time Optimization of Redundant Inputs:Because the spherical motor is characterized by a high number of distributed electrical inputs relative to its degrees of freedom, we utilize inverse solutions to the force/torque models in real time. This framework determines the optimal set of electrical inputs to achieve a desired motion while simultaneously meeting secondary objectives, such as minimizing energy losses or canceling undesirable bearing reactions.
Key Publication: Lee, Roth & Zhou (1996), Son & Lee (2010), Bai et al. (2018-2023). -
State Inference & Physics-Informed Inverse Solutions:While inverse solutions are often non-unique, we use forward physics-based models to analyze uniqueness conditions. These are then implemented via artificial neural networks (ANN) for robust, real-time perception
Key Publication: Bai & Lee (2014), Li, Lee & Hanson (2022).
Story 3: Resilience — Reaction-Free & Fault-Tolerant Systems
Addressing high-performance actuation challenges in mission-critical environments through field-based inverse models.
-
Minimum Bearing Reaction & 6-D Actuation: Leveraging redundant inputs, we introduced a PM motor capable of 6-D force/torque actuation. This actively minimizes bearing reaction forces, preserving long-term structural integrity and extending the operational life of the system.
Key Publications: Bai, Lee et al. (2017). -
Fault-Tolerant Remedy Strategies:We developed harmonic-based inverse models to suppress torque ripples, allowing for continued operation under open-circuit phase failures—a critical feature for aerospace and medical reliability.
Key Publication: Li, Lee et al. (2018), Lee et al. (2019). -
High-Frequency Oscillation & Chatter Prediction:Our analytical methods identify the onset of high-frequency oscillations in mechanical systems, providing a predictive framework for stability in everything from aircraft pumps to industrial machining.
Key Publication: Bai, Qin, Lee & Hao (2019), Li, Lee et al. (2021).
Pillar III: Bio-Robotics & Adaptive Systems
Pillar III addresses complex, compliant environments through models that bridge machine logic with biological reality. Driven by critical societal needs—such as automating hazardous tasks in food production for biosecurity—this research applies mathematical principles to the development of adaptive machines and wearable assistive technologies.
Patent
Title & Highlights
Key Impact / Publication
[P7]
Automated Transfer of Live Objects (US 6,623,346)
Landmark Advance: Automating the high-speed transfer of live birds. Recipient of the Kayamori Best Paper Award (IEEE ICRA).
[P8]
Automated Feet-Gripping System (US 7,134,956)
Biological Handling: Advanced mechanization for irregular, fast-moving geometries using adaptive control. Best Paper Award (Theory) (ASME/ISCIE).
[P9]
Wearable Intelligent Exoskeleton Seat (US 10,688,653)
Human-Centric: On-demand lower-limb support that utilizes biomechanical sensing to detect user intent and transition between support modes.
[P10]
Magnetically Reconfigurable Joint Motor (US 11,251,689)
Adaptive Actuation: A novel motor class that alters stiffness and torque profiles in real-time without mechanical changes.


Explore the technical summaries for Agricultural Automation or Wearable Systems.
Innovation Highlights & Success Stories
Story 1: From Automation to Anatomy — Adaptive Biological Interaction
Our research pioneered a unified approach to interacting with fragile systems, moving from biosecurity-driven industrial automation to clinical diagnostics.
-
Societal Drivers & Biosecurity: Following events such as the 2001 terror attacks, the 2003 SARS outbreak, and various avian flu crises, there was an urgent need to remove human contact from meat production for food safety. We responded by developing the theoretical framework for "natural object manipulation" to automate the high-speed transfer of live, unpredictable subjects.
Key Publications: Lee (2001), Webster & Lee (2003). -
Mathematical Foundation (Deformation & Compliant Analysis): We established the ability to model highly nonlinear compliant structures by introducing the Generalized Shooting Method and Explicit Dynamic FEA. This rigorous physics-based research allowed us to creatively utilize beam models for subsequent innovations in both robotics and biomechanical modeling.
Key Publication: Lan & Lee (2006, 2008), Lee & Liu (2012). -
The Spine-Equivalent-Beam:The principles of compliant modeling directly inspired the SEB functional model. By creatively treating the human spine as a subject-specific, large-deflection beam, we established a method to estimate structural rigidity ($EI$) and sagittal shape non-radiatively from back contours13131313. This model was primarily motivated by the need to incorporate real-time human spine mechanics into the design loop of wearable spine-assistive devices.
Key Publication: Xie (2020), Ding, Jiang & Lee (2024). Ding, Lee et al. (2024)
Story 2: Bio-Inspired "Flexonics" for Structural Health Monitoring (SHM)
This research utilizes the principle of "Flexonics"—where mechanical flexibility is an intentional functional component—to monitor the integrity of the built world.
-
Societal Drivers: The catastrophic I-35W Bridge Collapse in Minnesota (August 2007), which resulted in 13 casualties, underscored the desperate need for reliable, adaptive methods to monitor aging infrastructure.
-
Bio-Inspired Innovation (Flexonic MSN):We developed Mobile Sensing Nodes (MSN) that utilize flexonic structures to navigate complex, unstructured environments. By designing the node’s body as a large-deflection compliant beam, the structure acts as "fingers" to attach/detach accelerometers and "negotiates corners" on irregular surfaces.
-
Impact on Magnetic Structures:Utilizing magnetic attachment, this architecture provides a solution for the high-fidelity perception required for monitoring steel-based industrial infrastructure. This facilitates the non-destructive evaluation of hard-to-reach magnetic surfaces, contributing to safer structural maintenance through adaptive sensing.
Key Publication: Lee et al. (2009), Zhu et al. (2010), Guo et al. (2012).
Story 3: M3C Assistive Technology & Stroke Recovery
Our work in neuro-rehabilitation is grounded in the Mind-Motor-Motion-Control (M3C) paradigm, creating a seamless interface between human intent and robotic support.
-
Anatomically-Informed Pantographic Exoskeletons (PGE): To accommodate complex 3-DOF rolling and sliding of human joints, we developed two classes of PGEs: Compliant-PGE (magnetic sensing of joint parameters) and Mag-PGE (non-contact impedance control).
The Intelligence Layer:Both PGE classes utilize ANNs guided by physics-informed design to solve complex inverse problems in real-time, adapting to a user's specific biomechanics during gait cycles.
Key Publications: Lee & Guo (2010), Jiang et al. (2020, 2022-23), Que & Lee (2024). -
Selective Neuromuscular Activation:We established an analytical framework for Temporal Interference (TI) scanning that predicts local electric fields to drive neural activity, surpassing the limits of traditional modulation methods.
Key Publication: Li, Lee & Bai, IEEE TNSRE (2020). -
Single-Channel Bio-Electric Control:To assist individuals with severe motor impairments, we developed a system using a single dry electrode on the forehead to operate auxiliary appliances via neck-up bio-electric signals.
Key Publication: Shen, Hu, Lee & Fu (2015).
[P1] “Image Reading and Processing Apparatus”, S. Dickerson and K.-M. Lee
US Patent 5,146,340 | European Patent 0549736 | Canadian Patent 2,088,357
Conceived in the late 1980s; Commercialized by DVT (acquired by Cognex for $115M).
This foundational invention marked a pivotal turning point in industrial machine vision. By eliminating the need for analog-to-digital conversion (e.g., RS170 at 30 fps) and enabling direct digital image acquisition, this technology overcame the frame-rate bottlenecks and storage delays inherent in traditional video systems. The resulting platform— the first-generation industrial vision sensor — seamlessly integrated imaging hardware with onboard computing. This unified architecture catalyzed global advances in automated inspection, establishing the core technology for DVT vision sensors and later the Cognex portfolio. PDF
[P2] “Orientation Sensing System and Method for a Spherical Body”, K.-M. LeeUS Patent 5,146,340 | US Patent 5,319,577 (June 7, 1994)
This patent introduces a groundbreaking field-based method for direct 3-DOF orientation sensing, offering a high-performance alternative to mechanical linkages or single-axis encoders. By extracting orientation directly from field-derived patterns, the invention enables a "mechanically unconstrained" architecture that achieves unprecedented precision and responsiveness. This "mechanically unconstrained" architecture allows for unprecedented precision and responsiveness. Validated at speeds of 80 fps with an average error of 6.3µm (0.0047°), this shift from mechanical indexing to field-based sensing set a new benchmark for real-time orientation control in advanced robotics and aerospace systems.
[P3] “Spherical Motor and Methods”, K.-M. Lee
US patent 5,410, 232. (April 15, 1995)
A foundational breakthrough in multi-degree-of-freedom (multi-DOF) actuation, this patent enables precise three-axis rotational motion—pitch, yaw, and roll—within a single compact unit. By eliminating the need for cascaded single-axis joints, the design dramatically reduces system weight and volume. The motor utilizes controlled magnetic fields to generate smooth torque, featuring an integrated sensing structure that provides real-time feedback without external encoders. This innovation laid the groundwork for modern dexterous robotic wrists, satellite attitude control, and surgical robotics.
[P4] “System, and Method for Controlling a Variable-Reluctance Spherical Motor”, Lee, K-M., R. Blenis, and T.-L. Pao
US patent 5,410, 232. (April 15, 1995)
This patent established the pioneering control architecture required to operate variable-reluctance spherical motors. It provides the analytical framework for modeling magnetic-reluctance torque generation and sequencing stator-phase excitations. By addressing the nonlinear behavior intrinsic to variable-reluctance systems, this invention enabled stable, real-time, closed-loop control of 3-DOF motion. It remains a foundational reference for the realization of compact, multi-axis magnetic actuators in high-performance robotics.
[P5] “Real-Time Vision System and Control Algorithm for a Spherical Motor”, Lee, K-M., R. Blenis, and T.-L. Pao
US Patent 5,416,392 (May 16, 1995)
This invention represents one of the earliest integrations of real-time computer vision as a direct feedback mechanism for motor control for multi-DOF actuation. By extracting 3-DOF rotor orientation from visual patterns and mapping that data to torque commands in real time, the system eliminates the need for physical sensing hardware. This unified approach to perception and control allows for smooth, human-like motion, influencing contemporary research in vision-guided magnetic actuation and intelligent robotic joints.
[P6] “Method and Apparatus for Measuring Angular Displacement of an Actuator Arm Relative to a Reference Position”, K.-M. Lee, H. Garner, and L. Guo
US Patent 6,188,484 (February 13, 2001).
Developed in collaboration with Maxtor Corporation, this patent solved a critical bottleneck in the manufacturing of high-capacity hard disk drives (HDDs). The technology introduced a non-contact, optical measurement method for servo-track writing, replacing wear-prone mechanical pushpins and dual-loop feedback systems that were prone to instability and complexity. By simplifying the measurement of angular displacement, this invention significantly increased the reliability, precision, and throughput of high-density data storage production lines.
[P7] “Automated Transfer of Live Objects to Shackle Line Method and Apparatus”, K-M. Lee
US Patent 6,623,346 (September 23, 2003). Recipient of the Kayamori Best Paper Award (IEEE ICRA 2000).
This landmark patent addresses one of the most difficult challenges in agricultural automation: the reliable handling of live, unpredictable biological subjects. Representing 15 years of research supported by the U.S. Poultry & Egg Association, the invention integrates compliant motion control and dynamic modeling to automate the transfer of birds to a shackle line. Beyond its industrial relevance, the work established the theoretical framework for "natural object manipulation," influencing how robotics interact with deformable and variably behaving subjects.
[P8] “Automated Feet-Gripping System,” K.-M Lee
US Patent 7,134,956 (November 14, 2006) Recipient of the Best Paper Award (Theory) at ASME/ISCIE ISFA 2006.
Building on earlier breakthroughs in bio-automation, this patent introduces a self-aligning gripper architecture designed for high-speed conveyor operations. The system employs adaptive control strategies to maintain a stable grip on irregular geometries while minimizing stress to the biological subject. This work advanced the science of soft-contact manipulation, merging compliant mechanical design with real-time sensing to achieve reliable interaction with fast-moving, unpredictable systems.
[P9] “Wearable Intelligent Exoskeleton Sear Apparatus”, D. Wang and K.-M. Lee
US Patent 10, 688,653,653 B2 (June 23, 2020)
This patent introduces an "on-demand" wearable exoskeleton seat designed to reduce lower-limb fatigue without restricting natural movement. Utilizing a biomechanically informed framework, the device transfers a significant portion of the user’s body weight directly to the exoskeleton structure during standing or repetitive tasks. Integrated sensors detect user intent—such as sitting, leaning, or walking—to trigger adaptive support transitions. This hybrid approach offers a lightweight, unobtrusive solution for industrial workers, elderly users, and medical rehabilitation.
[P10] “Magnetically Reconfigurable Robot Joint Motor,” Bai, K., Y. Mi and K.-M. Lee
US Patent 11, 251,689 B2 (February 15, 2022)
This patent introduces a new class of robot motors capable of dynamically altering torque characteristics and stiffness through controlled magnetic-field reconfiguration. Unlike fixed-behavior motors, this "programmable" actuator can shift between high-torque, compliant, and precision modes without mechanical modifications. By selectively activating distinct flux pathways, the motor offers a compact alternative to bulky variable-stiffness mechanisms, laying the foundational groundwork for "safe" robotics and adaptive human–machine interaction.